Met de krachtige ontwikkeling van de elektronische industrie verandert de positiedetectie van sommige structurele componenten langzaam van de oorspronkelijke contactmeting naar de contactloze meting door middel vanHall-positiesensor en magneet. Hoe kunnen we een geschikte magneet kiezen op basis van onze producten en structuur? Hier doen we een aantal eenvoudige analyses.
Eerst moeten we het magneetmateriaal bepalen. Momenteel worden samarium-kobaltmagneet en neodymium-ijzerborium veel gebruikt in de halpositiesensor. Het belangrijkste verschil tussen de twee magneten is dat op basis van hetzelfde volume de NdFeB-magneet sterker is dan samariumkobaltmagneten; de thermische excursie van samariumkobalt is kleiner dan die van Nd-Fe-B; de oxidatieweerstand van samariumkobalt is sterker dan die van Nd-Fe-B, maar over het algemeen bevindt zich aan de buitenkant van de magneet een coating die het oxidatieprobleem kan oplossen; de samariumkobaltmagneet heeft een betere temperatuurbestendigheid dan de NdFeB-magneet, maar de temperatuurweerstandswaarde voor beide magneetmaterialen kan meer dan 200 ℃ bereiken. Daarom moeten we bij het selecteren van het type magneet dit beoordelen in combinatie met de kostenprestaties, de werktemperatuur en de werkomgeving. Over het algemeen kan NdFeB vaker worden gebruikt, vooral omdat het de beste magnetische veldeigenschappen heeft. Bij het werken in een breed temperatuurbereik wordt het echter aanbevolen om een samarium-kobaltmagneet te kiezen vanwege de kleine thermische drift.
Daarnaast moeten we enkele basisparameters van de magneet bepalen. Afhankelijk van de testpositie-informatie en de bewegingsrichting van het object bepalen we of de magnetisatierichting van de magneet diametraal of axiaal is. Daarnaast wordt bepaald of er gekozen wordt voor eenvierkante magneetof eencilinder magneetvolgens de installatiestructuur. Natuurlijk moeten we soms de vorm van de magneet aanpassen aan de structuur. Er is nog een andere vereiste factor met betrekking tot de magneetflux, die altijd onze zorg is geweest bij de magneetselectie. In feite moeten we het in de volgende twee aspecten analyseren:
1. De magnetische veldsterkte die wordt geïnduceerd door de halpositiesensor zelf en het geïnduceerde magnetische veldbereik in elke richting zullen duidelijk worden aangegeven in het sensorgegevensboek.
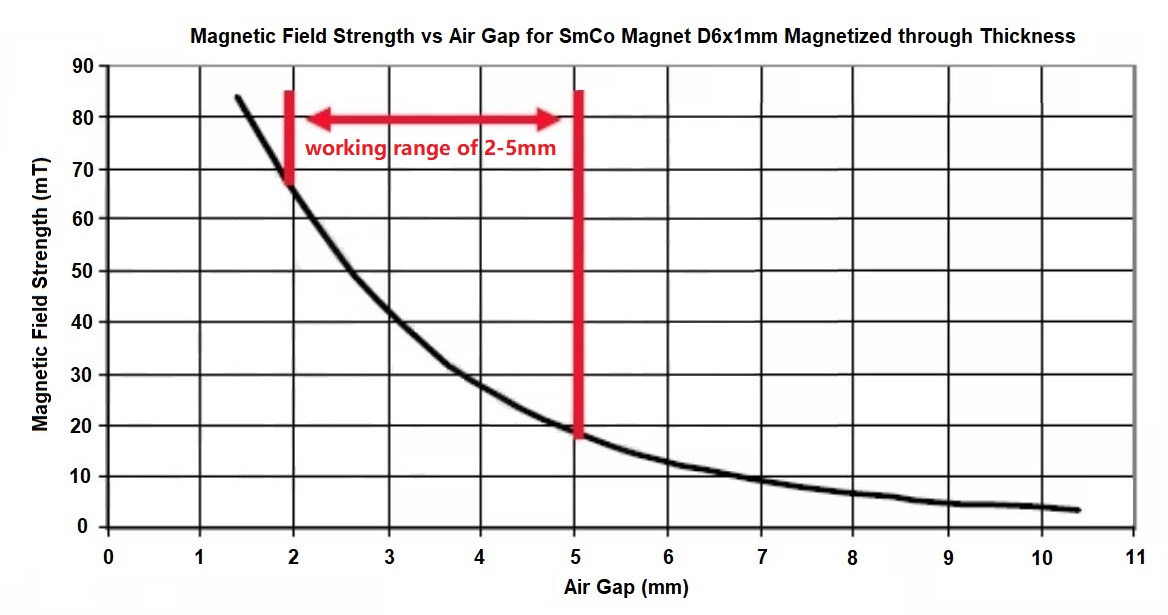
2. De afstand tussen de magneet en de sensor zelf wordt doorgaans bepaald door de productstructuur. Aan de hand van de bovenstaande twee aspecten en de magnetische veldveranderingscurve in onderstaande figuur als voorbeeld kunnen we de magnetische veldsterkte van de benodigde magneet bepalen.
Ten slotte moeten we begrijpen dat dit niet betekent dat zolang het magnetische veld binnen de bereikvereisten van de sensor valt, de magneet even ver van de sensor verwijderd kan zijn. Hoewel de sensor zelf een kalibratiefunctie heeft, moeten we begrijpen dat wanneer de magneet te ver van de sensor verwijderd is, de verdeling van het magnetische veld zelf moeilijk lineair of bijna lineair is. Dit betekent dat met de verandering van positie en de niet-lineaire verdeling van het magnetische veld zelf de sensormeting complex zal worden en de kalibratie zeer complex zal worden, zodat het product geen reduceerbaarheid heeft.
Het bovenstaande is slechts een eenvoudige analyse van de magneetselectie in Hall-sensortoepassingen. Wij hopen dat het u zal helpen. Als u tijdens het ontwikkelingsproces nog vragen heeft, neem dan contact met ons op,Ningbo Horizonmagneten. Wij kunnen verdere communicatie tot stand brengen en u technische ondersteuning bieden.
Posttijd: 12 augustus 2021